S2 玄武
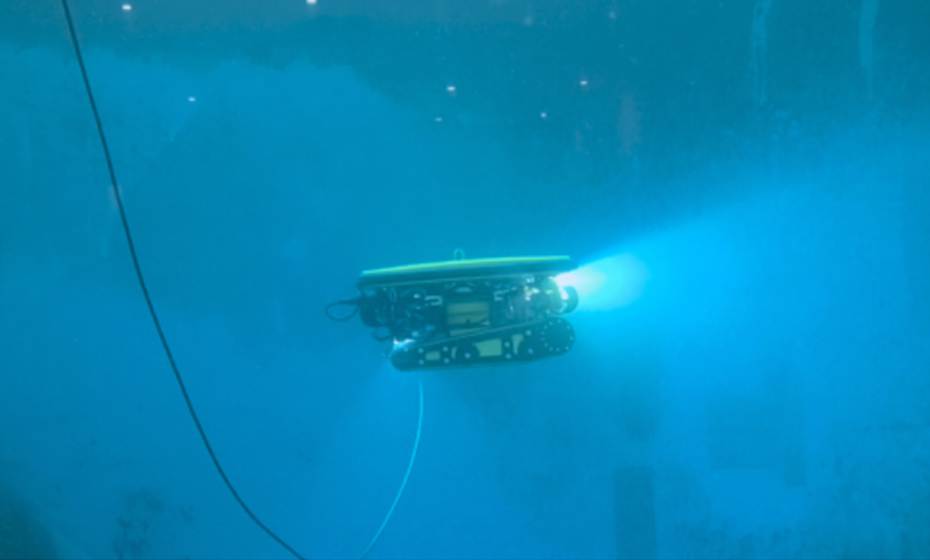
玄武號(hào)水下機(jī)器人采用浮游
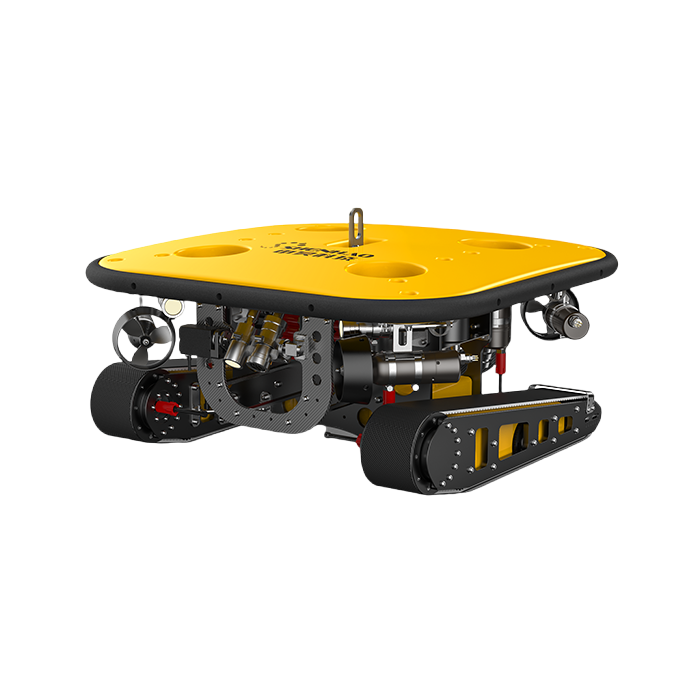
玄武號(hào)水下機(jī)器人采用浮游-爬行復(fù)合式ROV系統(tǒng)方案,具備模塊化結(jié)構(gòu)設(shè)計(jì)、ROV復(fù)合運(yùn)動(dòng)控制技術(shù)以及基于水下視覺的輔助作業(yè)與檢測技術(shù)。該ROV采用高機(jī)動(dòng)性設(shè)計(jì)方案,可在水下實(shí)現(xiàn)360度翻滾、貼壁爬行,具備較強(qiáng)的巡檢運(yùn)維能力,主要面向水庫大壩的裂紋檢測,船體清洗以及海洋平臺(tái)導(dǎo)管架檢測運(yùn)維等。













 language
language